
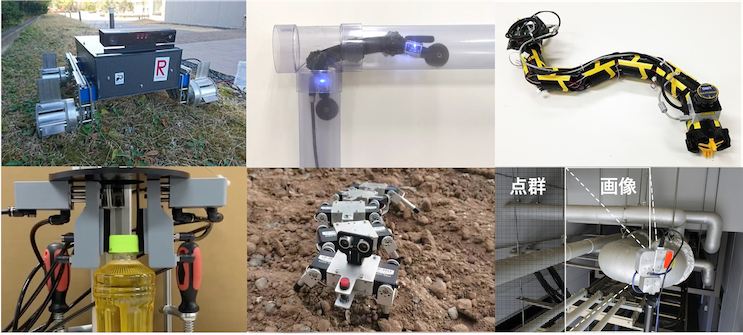
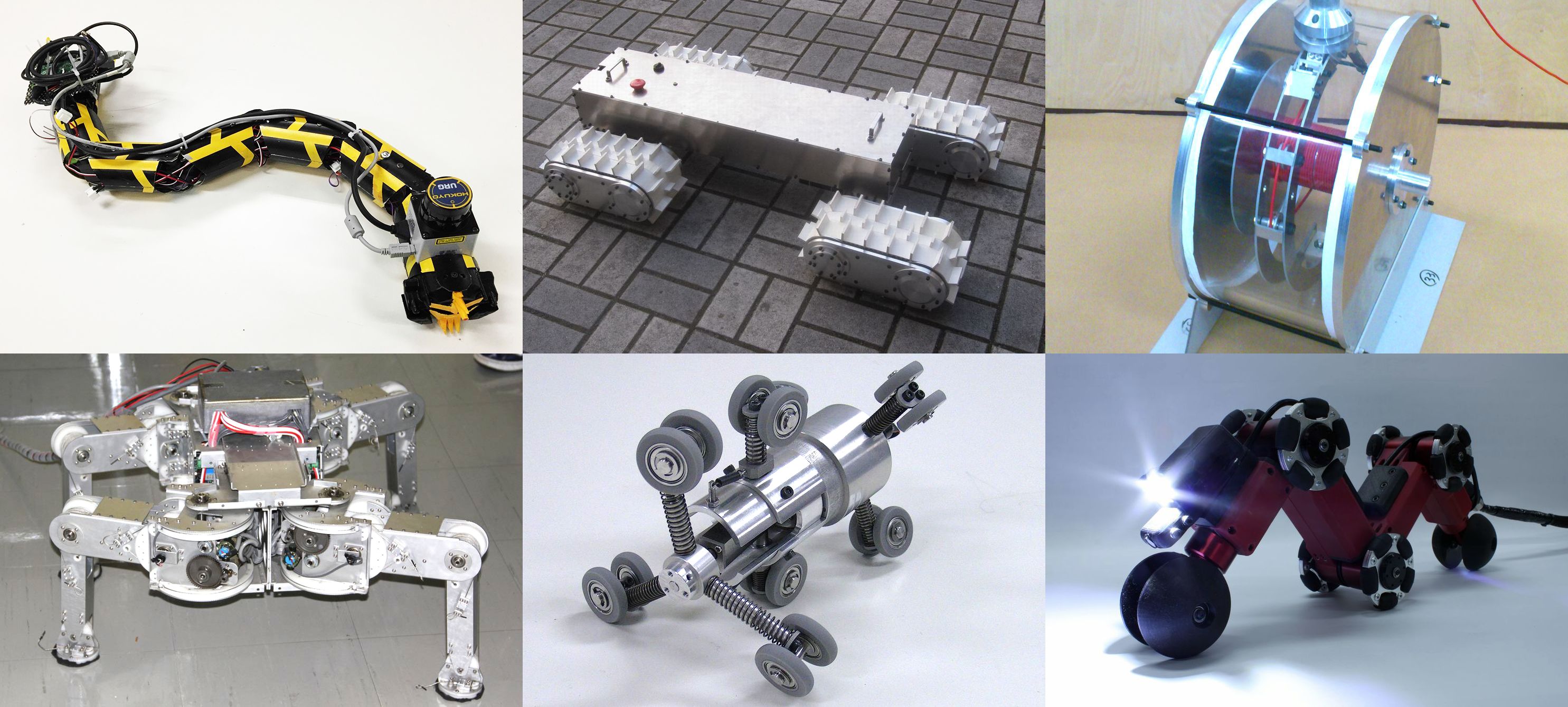

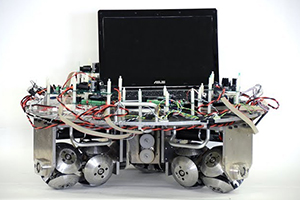
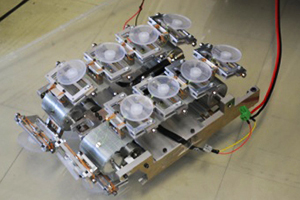
生物は極めて多くの自由度を持つ身体とそれに対応する知能を有しており、あらゆる環境において柔軟かつ迅速に動くことができます。本研究室では、社会に役立つロボットを実現するために、特に未知のパワーを持つ生物の「動き方」をヒントに、生物知能機械や環境適応機構の研究開発を積極的に行っています。具体的には蛇型ロボットや多脚ロボットなど、生物の身体や運動知能をモデルとしたロボットの研究開発、水陸両用ロボットや管内移動ロボットなど、新しいロボット機構と制御の研究開発に取り込んでいます。本研究室はこのような新しい技術の研究だけでなく、配管図作成、配管内計測、建造物の錆検査など、ニーズ中心の研究開発も行っています。本研究室は国際色豊かで、多くの国際学生が在籍し、海外研究機関との研究交流も積極的に行っています。
新着ニュース 【一覧】

2023年9月22日:第41回日本ロボット学会学術講演会(RSJ2023)が仙台国際センターにて開催
2023年9月11日(月)〜9月14日(木)に第41回日本ロボット学会学術講演会(RSJ2023)が仙台国際セ … "第41回日本ロボット学会学 Read more


2023年7月19日:ROBOMECH2023 名古屋にてポスター発表
こんにちは!M1大國です。6/28(水)~7/1(土)に名古屋で「ROBOMECH2023」が開催されました。 … "ROBOMECH2023 名古屋にてポ Read more


2023年6月16日:M2村田憲哉さん「ナベル賞」を受賞@アスターフォーラム2023
6月9日にびわ湖大津プリンスホテルにて”アスターフォーラム2023が開催され、本研究室から7名が参加しました。 … "M2村田 Read more




 大学関連
大学関連
 研究室関連
研究室関連
 授業関連
授業関連
 その他
その他
![]()
![]()
![]()
![]()
![]()
Copyright © BioInMech Lab All Rights Reserved. Created by A. Kakogawa.
