
水陸両用ロボット
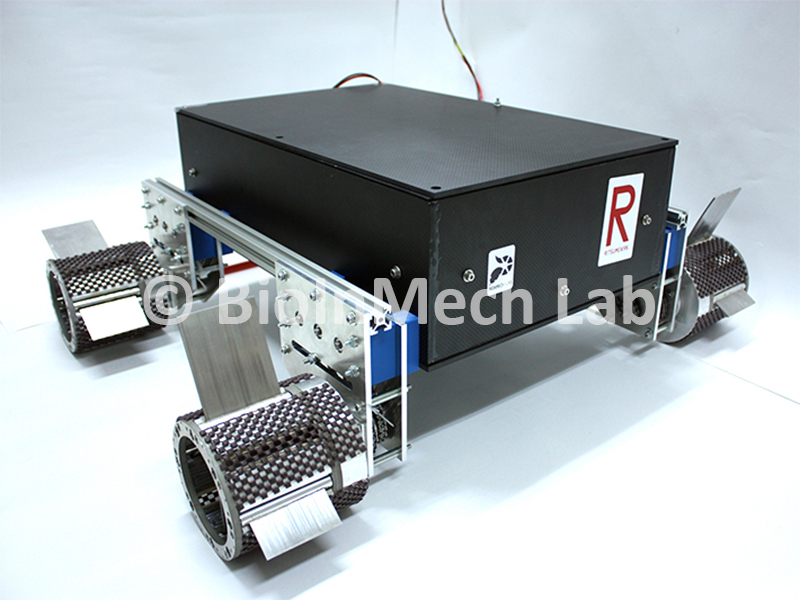
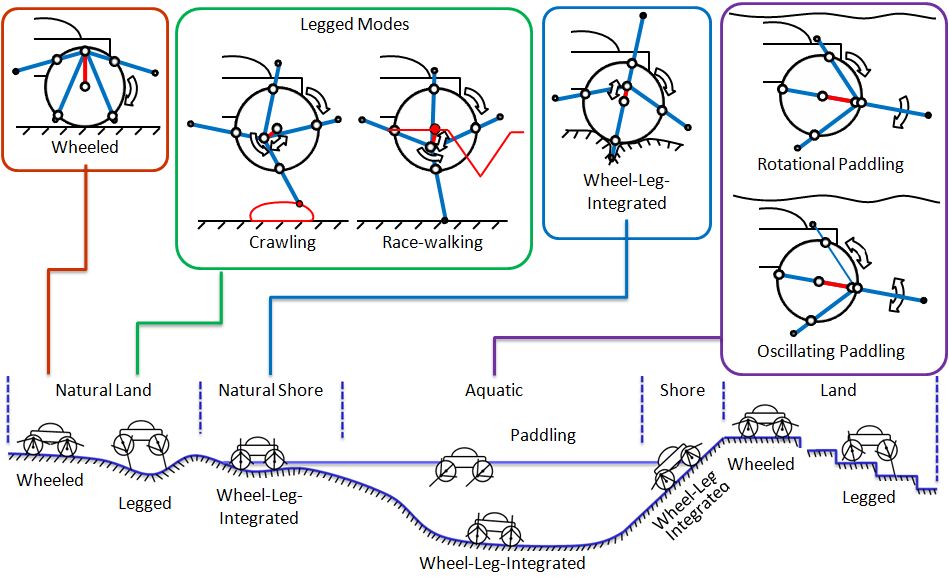
陸上や水中を移動することのできるフィールドロボティクスの研究開発は世界中で活発に行われています.しかし,陸上用ロボットの多くは水中で利用できず,同様に水中用ロボットの多くは陸上で利用できません.また,自然界では沼地のように陸上と水中の両方が混在する環境も多く存在します.ロボットがこれらの陸上,水中,水陸混在環境を移動するためには,それぞれの環境に適した移動形態を取る必要があります.例えば,陸上の平地であれば車輪駆動が最も移動効率が良く,岩場などの凸凹した地面でも車輪半径を大きくすることで適応できます.しかし,地面に穴が空いていたり,車輪が滑ってしまうような状況下では脚駆動の方が適応性が高いことがあります.また,水中では水を掻き出す機構が必要になるため,車輪駆動のみでは移動効率が非常に悪くなってしまいます.そこで本研究では,偏心パドル機構(ePaddle)と呼ばれる車輪とパドルを組み合わせたモジュール機構を提案し,車輪移動,脚歩行,パドル推進の3種類の移動形態を1つのロボットで実現しています.
偏心パドル機構 ePaddle
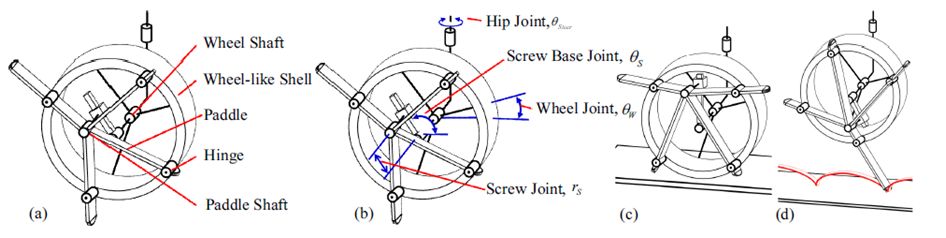
偏心パドル機構 (ePaddle: Eccentric Paddle Array) は,パドルの回転中心とパドルを覆う車輪(シェル)の回転中心を偏心させることによって実現されます.パドルの回転中心と車輪の回転中心が一致する場合,車輪を回転させても車輪外に出るパドルの長さは常に一定になります.一方,パドルの回転中心と車輪の回転中心ずらした場合,車輪外に出るパドルの長さは回転とともに変化します.この偏心パドル機構の持つ特徴を活かし,車輪外に出るパドルの運動軌跡を制御することによって環境に応じた多様な動作が可能になります.
- Yayi Shen, Yi Sun, Huayan Pu and Shugen Ma, Experimental Verification of the Oscillating Paddling Gait for an ePaddle-EGM Amphibious Locomotion Mechanism, in Proc. 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2017), 2017, Vancouver, Canada, DOI: 10.1109/LRA.2017.2707124, (Published in IEEE Robotics and Automation Letters, 2017).
- Yayi Shen, Huayan Pu, Yi Sun, Shugen Ma, Shaorong Xie, Jun Luo and Wenchuan Jia, Generating Vectored Thrust with the Rotational Paddling Gait of an ePaddle-EGM mechanism: Modeling and Experimental Verifications, IEEE Journal of Oceanic Engineering, 42-3, pp. 522-531, 2017, DOI: 10.1109/JOE.2016.2576181.
- Yayi Shen, Yi Sun, Huayan Pu and Shugen Ma, Experimental Verification of the Oscillating Paddling Gait for an ePaddle-EMG Amphibious Locomotion Mechanism, IEEE Robotics and Automation Letters, 2-4, pp. 2322-2327, 2017, DOI: 10.1109/LRA.2017.2707124.
- Yi Sun and Shugen Ma, A Versatile Locomotion Mechanism for Amphibious Robots: Eccentric Paddle Mechanism, Advanced Robotics, vol. 27, no. 8, pp. 611-625, 2013.
- Yi Sun, Shugen Ma, Yang Yang and Huayan Pu, Towards Stable and Efficient Legged Race-walking of an ePaddle-based Robot, Mechatronics, vol. 23 no. 1, pp. 108-120, 2013.
