
冗長ロボット
ここでの「冗長」とは,最低限必要な数より多いという意味を指します. 私たちが暮らす空間は縦横高さの尺度を持つ3次元空間であり,ロボットがこの空間内を自由に行き来するためには3つの自由度,つまり3つの動力源が必要になります. しかし,動物の世界に目を向けると,彼らは空間を移動するために必要な自由度よりもはるかに多い関節とそれらを動かす筋肉を有していることがわかります. 私たちの身体も同様で,例えば,人間の腕は肩から手首までで合計7自由度あります(両腕を合わせると14自由度). この冗長性によって,人間は手前にある障害物を避けながらその奥にある物をつかんだり,狭いところに手を伸ばすことができます. 人間の腕が3自由度しかなかったら,手を同じ位置と姿勢で維持しながら他の腕の関節を曲げるといった器用な動作はできないはずです. 本研究室では,このような冗長性を有するロボットの研究開発を行っており,その代表例としてヘビ型ロボットや多自由度ロボットアームの研究に取り組んでいます.
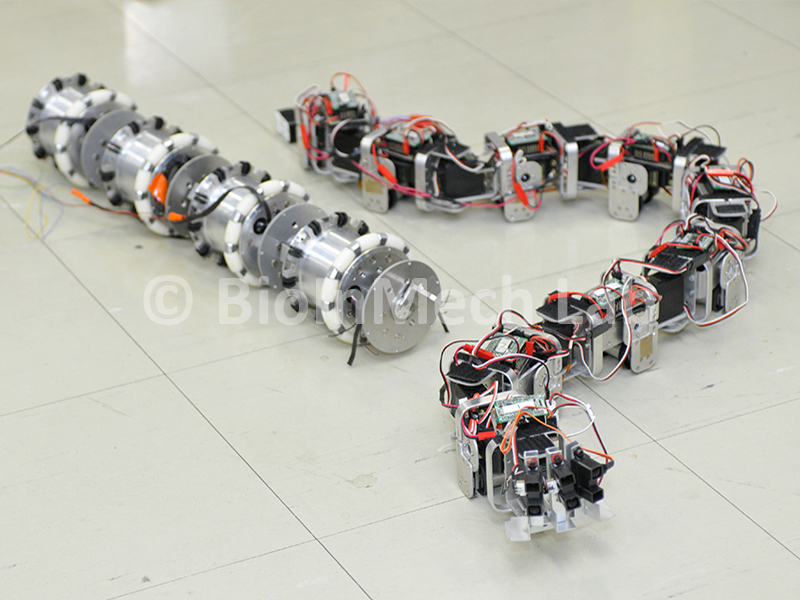
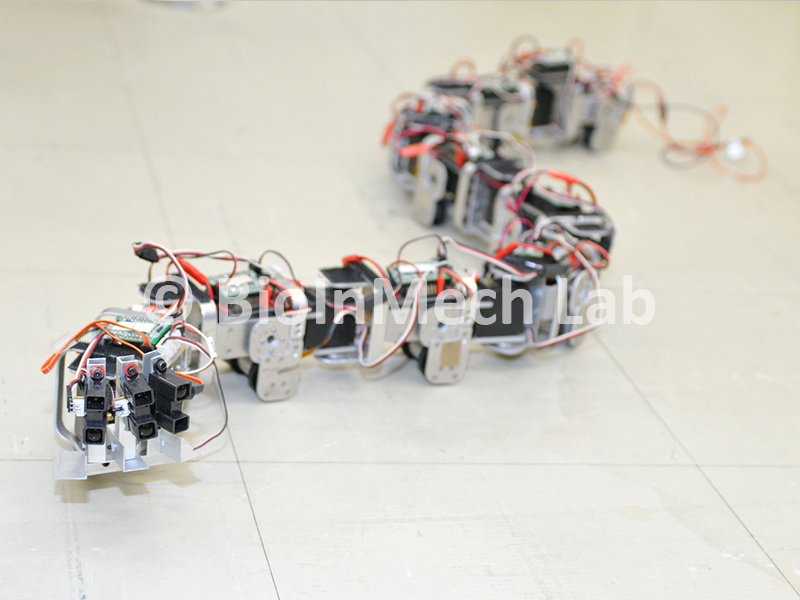
ヘビ型ロボット
蛇は一本の紐状の単純な形態であるにも関わらず,体幹形状を複雑に変化させることにより,様々な環境に適応することができる生物です. こうした蛇の特徴をロボットに適用することで,従来の移動ロボットに比べ,環境適応能力の高い移動ロボットを実現することができると考えられています. また,ヘビ型ロボットは同一の”関節ユニット”を直列に多数連結することにより構成されるロボットであるため,関節単位での分離や交換が容易であるという利点もあります.
現在も世界中でヘビ型ロボットの研究が行われていますが,本研究室のアプローチは以下の通りです.
- 高い運動性能を有しながら小型かつ軽量なヘビ型ロボットの実現のための関節ユニットの機構設計
- ヘビ型ロボットの最適な運動形態を導き出すための動力学的解析
- CPG(神経振動子)を用いたヘビ型ロボットの自律分散的制御方法の理論的検討
また,蛇型ロボットが最も速く推進できるような体形形状についての研究も従来より行われていますが,そのほとんどが運動学に基づいたものでした. そこで 本研究室では,動力学を考慮した蛇型ロボットの運動解析についての研究を行っています.

- Shugen Ma. Analysis of Creeping Locomotion of a Snake-like Robot. Int. J. of Advanced Robotics. 2000
- Shugen Ma, Yoshihiro Ohmameuda and Kousuke Inoue. Dynamic Analysis of 3-dimensional Snake Robots. In Proc. 2004 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS’04), pp.767-772, Sendai, Japan, 2004
多自由度ロボットアーム(象の鼻型)
現在様々な分野でロボットが利用されています. しかし,一般に言われているような工業用ロボットでは,自由度が6未満(つまり,関節数が少ない)であるため,多数の機器が混在するような空間で障害物を回避するということができません. これに対して,象の鼻のような自由度の高い多関節のロボットならば,マニピュレータ全体の姿勢制御により障害物回避が行いやすくなります.
ところが,多自由度のマニュピレータを工業用ロボットと同じような作りにしてしまうと,マニュピレータで扱える物体の重さがほんの少しになってしまうという問題点が出てきます. それは,工業用ロボットのほとんどが関節にアクチュエータ(モータ)を装備しているため,単に関節を増やすだけではマニピュレータの重量が増加してしまい,それを駆動させるためには大出力のアクチュエータが必要となってしまうからです.
そこで,この研究では,アーム重量の増加を防ぐためにアクチュエータをマニピュレータの土台部に集中的に装備し,ワイヤによって伝達駆動させるという方法で,象の鼻のように多くの関節を持つ超多自由度ロボット・マニピュレータを開発し,その特性を生かした制御方法の研究などを行っています.
- S. Ma, S. Hirose, and H. Yoshinada. Design and Experiments for a Coupled Tendon-driven Manipulator, IEEE Control Systems Magazine, 1993
- S. Ma. A New Formulation Technique for Local Torque Optimization of Redundant Manipulators. IEEE Trans. on Industrial Electronics, 1996
- Shugen Ma, Isao Kobayashi, Shigeo Hirose, and Kiyoshi Yokoshima. Development of a Multijoint Manipulator: Moray Arm. IEEE/ASME Trans. on Mechatronics, 7-3, pp.304?317 2002.9
- Shugen Ma and Mitsuru Watanabe, Minimum Time Path-tracking Control of Redundant Manipulators. JSME Int. Journal, Series C: Dynamics, Control, Robotics, Design and Manufacturing, 47-2, pp.582?590, 2004.6
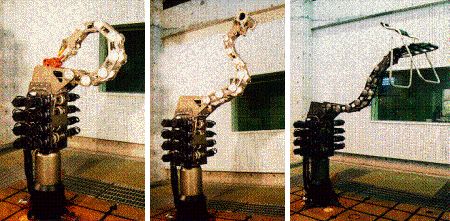
多自由度ロボットアーム(うつぼ型)
モレイ型多関節ロボットアームは,海底に住むうつぼ(モレイ)のようなロボットアームです.アームの基台部に強力なスライダーを装備したものです.アーム を運動させる際に出来る限りスライダーの駆動力を利用し,アームの関節機構を軽量化を図ります.このような強力なスライダーを持つ機構の有効性を引き出すために,駆動制御法として,アームを軌道上に拘束しながら引き込み,押しだし動作を行なう駆動制御法などがあります.
モレイ型多関節ロボットアームは以下のような特徴を有しています.
- 駆動力の大部分をスライダーに負担させることにより,アームの関節機構の負担を軽減し,アームの軽量化ができる.
- スライダー部が格納器としても機能する.そのために,与えられた作業に必要な長さのアームを引き出した状態で作業を行なう事が可能になる.
- アームの引き込み,押しだし動作を同一の軌道上を辿られることが出来る.アーム全体を振り回さないために,障害物回避特性が高く,また水中では流体抵抗を軽減できる.

