
劣駆動ロボットグリッパー
歯車&モータ差動駆動方式
現在,産業用ロボットの把持機構として数多くのロボットグリッパが使用されています.しかし,対象物の形状やサイズが変われば,それらに適したグリッパにその都度交換しなければなりません.そこで,汎用的な把持機構として,人の手を模した多指ロボットハンドが盛んに研究されています.人の手は物を掴むという動作だけでも,円形,棒状,紙状など様々な形状の物だけでなく,剛体やスポンジなど硬さの異なる物も把持することができます.また物を掴む以外にも向きを変える,転がす,折り曲げるといった動作も容易です.多指ロボットハンドはこれらの動作を可能にしますが,重量やサイズが増加し,制御が複雑になります.一方,平行グリッパと呼ばれるシンプルな構造に新たな機能を加えることによって様々な物体の把持や操作を可能にするロボットが開発されています.しかし,これらのグリッバは機能を増やすためにモータ数が増加し,結果的にグリッパが重くなり,サイズも大きくなります.そこで本研究では,1つのモータですべての指を駆動し,さらに物体を掴んだ後の引き込み動作をも可能にするロボットグリッパを開発しました.3指の場合,把持の3自由度とそれぞれの指の引き込み動作の3自由度を備えているため,合計6自由度ありますが,これらをたった1つのアクチュエータで駆動しています.
本グリッパの特徴をまとめると以下のようになります.
- 差動機構を用いて1入力多出力駆動を実現することにより,アクチュエータの数を減らし,制御回路を簡単にすることができる
- 従来のグリッパでは,布状物体のピンチング(摘んで持ち上げる動作)が困難,あるいは可能であっても複雑な機構や制御が必要であったのに対し,本グリッパは簡単な機構で制御せずに同じ動作を実現している
- 手のひらに回収口を設けることにより物体を把持した後に回収できる
- 差動機構の2つの出力バランスを減速比(歯車の歯数比など)や機械的な摩擦を利用して調節することにより柔らかい物体の把持と引き込みが可能になる
- 接触検知を一切行うことなく物体把持から引き込み動作へ切り替えを行うため,接触センサが全く不要となる
- 本グリッパをマニピュレータの先端に取り付けた場合,手先位置を上下することなく指の動作のみで物体の鉛直持ち上げが可能となる
- グリッパ機構に電気系の部品を備える必要がないため,指部分の防塵防水設計が不要となる,あるいは大幅な簡素化が可能となる
- 一般的なグリッパの場合,指に把持力を加え過ぎると,モータには大きな負荷がかかるため故障の原因になりやすいのに対し,本グリッパの場合,把持力がかかり過ぎてもベルトの回転へトルクが逃げるため,モータへの負荷が軽減し,故障を防ぐことができる
- Atsushi Kakogawa, Hiroyuki Nishimura, and Shugen Ma, Underactuated Modular Finger with Pull-in Mechanism for a Robotic Gripper, IEEE International Conference on Robotics and Biomimetics, pp. 556-561, 2016, Qingdao, China
- Hiroyuki Nishimura, Atsushi Kakogawa and Shugen Ma, Development of an Underactuated Robot Gripper capable of Retracting Motion, In Proc. IEEE Int. Conf. Robotics and Biomimetics, pp. 2161-2166, 2012
- 把持装置(申請 特願:2014-154066; 公開特開:2016-030316)
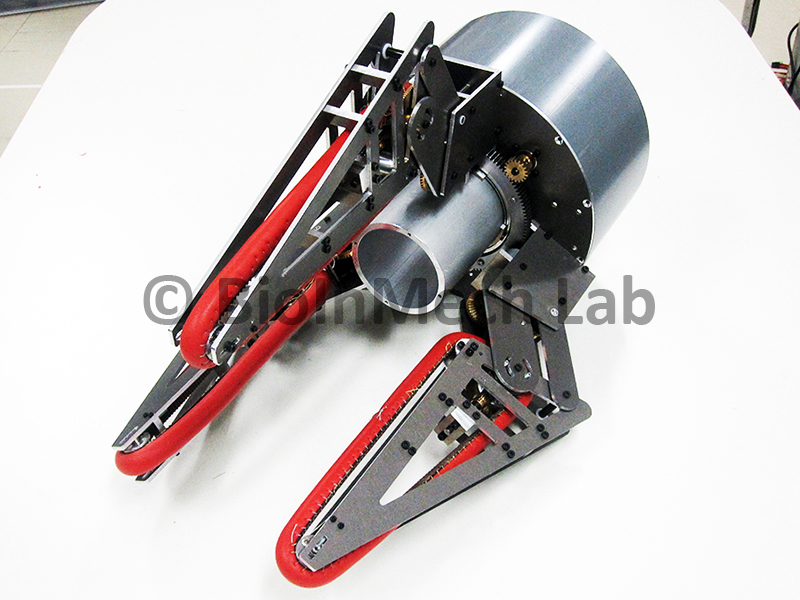
空気圧差動駆動方式
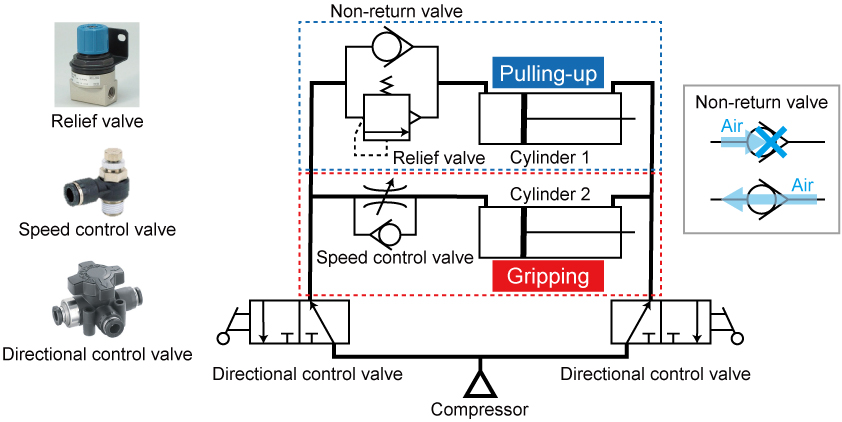
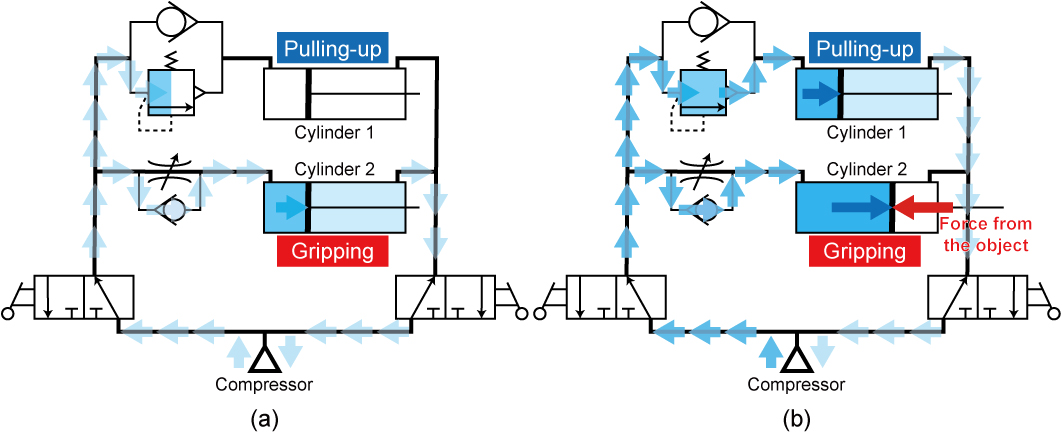
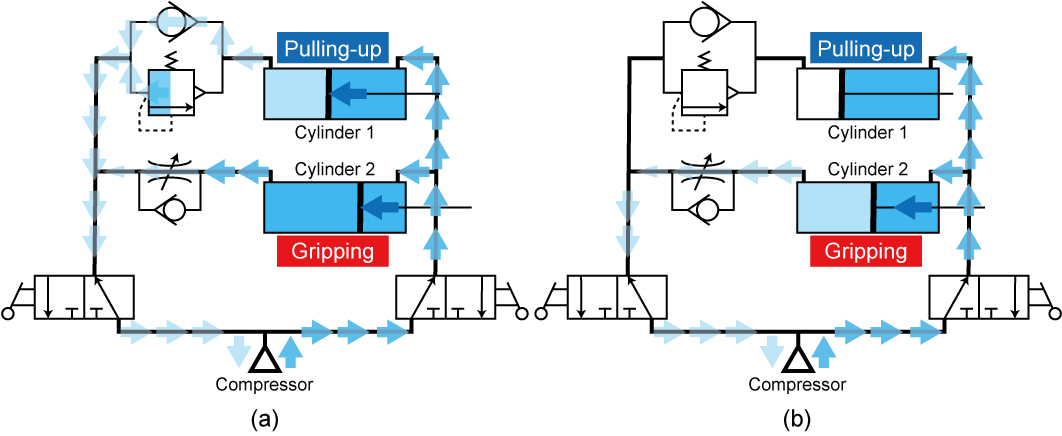
上記のグリッパーは劣駆動機構によって余計なアクチュエータやセンサを必要とせず,2つの動作の切り替え(物体の把持動作から引き込み動作)を自動で(機械的かつ受動的に)行うことが可能です. しかし, 歯車&モータ差動駆動方式では,差動機構を実現するために多くの歯車を使用していたため,結果的に大型化や重量化を招いていました. さらに,動力分配のための調整機構が複雑化する傾向にあり,把持速度,引き込み速度が非常に遅かったという欠点もありました. そこで本研究では,空気圧駆動で1つのコンプレッサからのエアーチューブの分岐とリリーフ弁を用いることで動力分配を実現し,様々な物体の把持と引き上げ動作が可能な空気圧グリッパーを開発しました. 新しい空気圧式の差動グリッパは空気回路内の分岐を用いて簡単に動力を分配(差動機構)しているため,機構がシンプルで軽量であり,把持と引き上げの動作も大幅に高速化できます. また,従来の歯車&モータ差動駆動方式ではできなかったワークの押出し後の解放動作も可能になりました.

- Atsushi Kakogawa, Yuki Kaizu, Shugen Ma, Sensor-less and Control-less Underactuated Grippers with Pull-in Mechanisms for Grasping Various Objects, Frontiers in Robotics and AI, 8, pp. 1-19, 2021, 10.3389/frobt.2021.631242.
- 把持装置(申請 特願2019-213940)
