
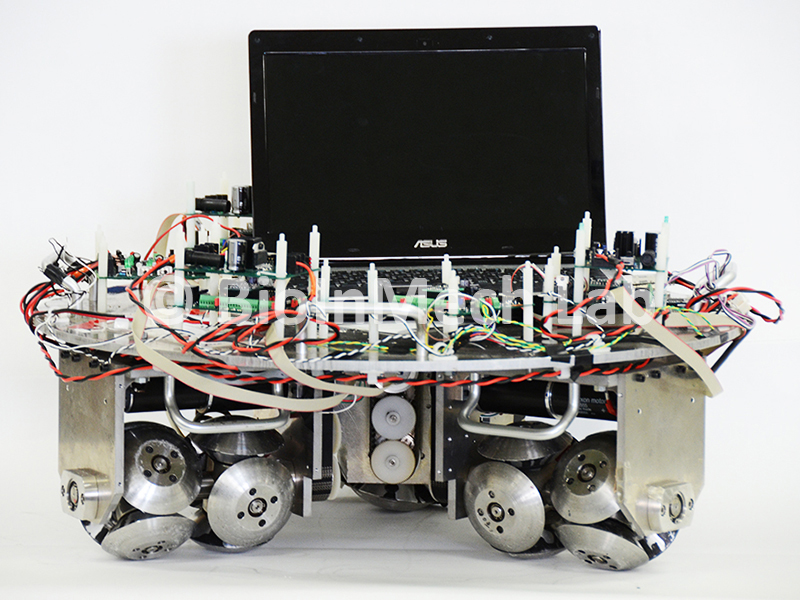
全方位移動ロボット
Omnidirectional mobile robots have long been attracting researchers’ interest, and various robots have been proposed by far. An omnidirectional robot means the robot is able to move instantaneously toward any direction without changing its own configuration. Compared with other common mobile robots, this kind of robots shows excellent agility when moving in constrained areas, such as office and housing environments. Based on the MY module, a four-wheeled omnidirectional mobile robot has been developed in our lab. The diameter of the platform is 640mm.
MY-wheel機構
Most omnidirectional robots are designed by using different kinds of omnidirectional wheels such as the Mecanum wheel or the Omni wheel. Normally three or more omnidirectional wheels are needed to form a mobile platform which can move omnidirectionally on the floor. In order to study on omnidirectional motion with different numbers of wheels for further research, we decided to design each wheel as one identical module so that they can easily be assembled together as an omnidirectional robot with different numbers of wheels. The main shaft which holds the two sets of truncated spheres is driven by a DC motor through a synchronous belt. A pair of spur gears transmits the motion of the main shaft to an absolute encoder which is buried into the gap between the two sides of the belt so that the absolute position of each wheel during motion can be recorded by the encoder.

- Changlong Ye and Shugen Ma, Development of an Omnidirectional Mobile Platform, In Proc. IEEE Int. Conf. Mechatronics and Automation, pp. 1111-1115, 2009
- Shugen Ma, Chao Ren and Changlong Ye, An Omnidirectional Mobile Robot: Concept and Analysis, In Proc. IEEE Int. Conf. Robotics and Biomimetics, pp. 920-925, 2012
- Chao Ren, Shugen Ma, Yi Sun and Changlong Ye, A Continuous Dynamic Modeling Approach for an Omnidirectional Mobile Robot, Advanced Robotics, vol. 29, no. 4, pp. 253-271, 2015
