
壁面移動ロボット
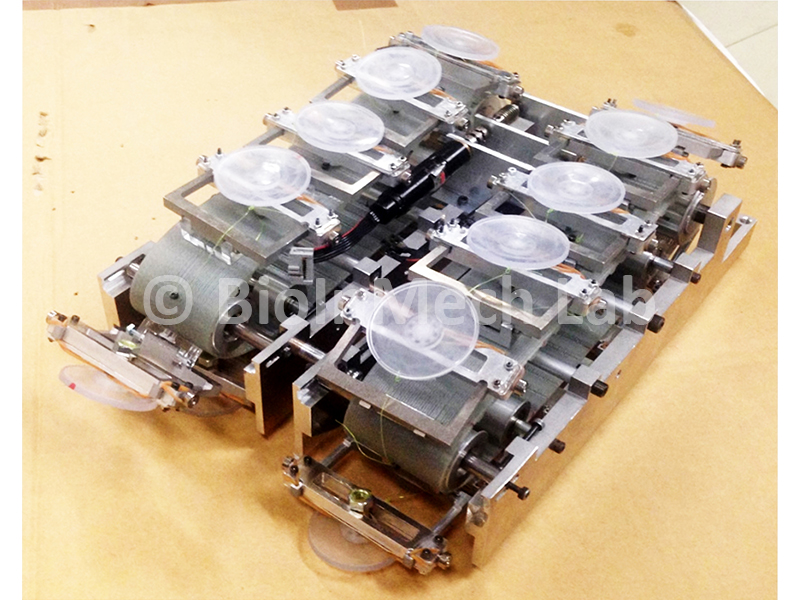
これまで,真空ポンプやプロペラ等の能動的な空気吸引装置を用いて壁面に貼り付く方法は数多く提案されてきました.しかし,装置が大型・重量化するだけでなく,騒音の問題が残ります.そこで,本研究室では一般的な吸盤のみを用いて小型・軽量な壁面移動ロボットを開発しました.このロボットは複数の吸盤をベルトに取り付けたクローラ構造となっており,前部に吸盤押付機構を,後部に吸盤引きはがし機構を備えています.ベルトを回転させることにより,吸着と引きはがしを同時に繰り返しながら壁面を上ります.

- Dingxin Ge, Chao Ren, Shugen Ma and Takahiro Matsuno, Guide Rail Design for a Passive Suction Cup based Wall-Climbing Robot, in Proc. 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2016), pp. 5776-5781, 2016, Daejeon, Korea.
- Yu Yoshida and Shugen Ma, Design of a Wall-climbing Robot with Passive Suction Cups, In Proc. IEEE Int. Conf. Robotics and Biomimetics, pp. 1513-1518, 2010
- Yu Yoshida and Shugen Ma, A Wall-climbing Robot without Any Active Suction Mechanisms, In Proc. IEEE Int. Conf. Robotics and Biomimetics, pp. 2014-2019, 2011
