
配管内検査ロボット
連結車輪型配管内検査ロボット:AIRo-2.4,AIRo-2.5
連結車輪型ロボットは複数のジグザグの形をしたリンクが配管内で平面的に拡張します.そのため,配管に穴が空いていたり,途中で分岐していたりしても,拡張方向と穴や分岐の方向が合わなければその方向に駆動部が逃げて引っかかることはありません. その一方で配管軸周りのロボットの姿勢が適切な方向を向いていないと湾曲部や分岐部を通過することはできません. そこで本研究では,これまで全方向車輪と半球車輪を組み合わせて配管軸回りにロール回転することができるロボットを開発してきました.
しかし,配管内は空間的な制約が非常に大きく,このようなその場回転動作を行うためには前進後退用のアクチュエータの代わりにロール回転用のアクチュエータを用いなければならず,推進力を犠牲にしてしまいます. また,ロボットの筐体内に占める駆動用アクチュエータの割合が高くなるため,関節の屈曲動作にもアクチュエータを使うことは望ましくなく,本研究では関節にねじりコイルバネを用いて屈曲させています. そこで本研究では,限られた前進後退用のアクチュエータ(2つ)と関節のねじりコイルバネのみで垂直管や曲管を走行するための設計理論を提案しました.

- Atsushi Kakogawa and Shugen Ma, Design of a Multilink-articulated Wheeled Pipeline Inspection Robot using Only Passive Elastic Joints, Advanced Robotics, 32-1, pp. 37-50, 2018, 10.1080/01691864.2017.1393348, (Selected and extended paper from IROS 2016).
- 管内走行装置(特開2017-7520)
【参考文献】
- G. C. Vradis and W. Leary, Development of an Inspection Platform and a Suite of Sensors for Assessing Corrosion an Mechanical Damage on Unpiggable Transmission Mains, Technical Report of NGA and Foster-Miller, 2004.
- E. Dertien, S. Stramigioli, and K. Pulles, Development of an Inspection Robot for Small Diameter Gas Distribution Mains, in Proc. the IEEE Int. Conf. Robotics and Automation, pp. 5044-5049, 2011
- P. Debenest, M. Guarnieri, and S. Hirose, PipeTron Series - Robots for Pipe Inspection, in Proc. of the 3rd Int. Conf. Applied Robotics for the Power Industry, pp.1-6, 2014.
- K. Tadakuma, Tetrahedral Mobile Robot with Novel Ball Shape Wheel, in Proc. the First IEEE/RAS-EMBS Int. Conf. Biomedical Robotics and Biomechatronics, pp. 946-952, 2006.
- K. Tadakuma, R. Tadakuma, and J. Berengeres, Development of Holonomic Omnidirectional Vehicle with "Omni-Ball": Spherical Wheels, in Proc. the IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 33-39, 2007.
トルク感知可能な能動関節:AIRo-2.3,AIRo-5.1
上記のロボットは関節に備わったバネにより駆動輪を押し付けていました.しかし,内径変化や滑りやすい内壁を含む配管では車輪の摩擦力が減ってしまい,滑って前進できない課題を抱えていました. そこで本研究では,トルク感知可能な能動関節を有する配管内検査ロボットを開発しました. このロボットは内径変化に応じて柔軟に関節角度を変えられ,さらにその関節トルクを制御することにより環境に応じて押し付け力を増やし,車輪の最大静止摩擦力も調整可能です.
さらに本ロボットの最大の特徴は垂直T字管走行(配管の角の曲率半径がゼロのものも含む)を可能にした点です. 能動関節1つのみで構成されるAIRo-2.3の前後にバネによる受動関節を取り付けたAIRo-5.1は3つの関節全てにモータを追加することなく余弦波軌道に沿った一軸角度制御のみでT字管走破可能です.


- Atsushi Kakogawa and Shugen Ma, A Multi-link In-pipe Inspection Robot Composed of Active and Passive Compliant Joints, IEEE/RSJ Int. Conf. Intelligent Robots and Systems (IROS 2020), pp. 6472-6478, 2020, Las Vegas, USA (Virtual).
- Atsushi Kakogawa and Shugen Ma, An In-pipe Inspection Module with an Omnidirectional Bent-pipe Self-adaptation Mechanism using a Joint Torque Control, IEEE/RSJ Int. Conf. Intelligent Robots and Systems (IROS 2019), pp. 4347-4352, 2019, Macau, China.
- Atsushi Kakogawa and Shugen Ma, Differential Elastic Joint for Multi-linked Pipeline Inspection Robots, IEEE/RSJ Int. Conf. Intelligent Robots and Systems (IROS 2018), pp. 949-954, 2018, Madrid, Spain.
- 管内走行装置(特願2020-090724)
- 管内走行装置(特願2019-102358)
【参考文献】
- D. Rollinson, S. Ford, B. Brown, and H. Choset, Design and Modeling of a Series Elastic Element for Snake Robots, in Proc. the ASME Dynamic Systems and Control Conference, pp. 1-5, 2013.
- D. Rollinson, Y. Bilgen, B. Brown, F. Enner, S. Ford, C. Layton, J. Rembisz, M. Schwerin, A. Willig, P. Velagapudi and H. Choset, Design and Architecture of a Series Elastic Snake Robot, in Proc. the IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 4630-4636, 2014.
影画像を利用した曲管内走行のための操作補助システム
本研究では,照明(LED)とカメラの配置を工夫することによって画像内に現れる三日月状の影の位置から曲管の手前で回転すべきロボットの方向を自動修正し,オペレータの操作補助を行うシステムを開発しました.

- Atsushi Kakogawa, Yuki Komurasaki, and Shugen Ma, Shadow-based Operation Assistant for a Pipeline-inspection Robot using Variance of Pixel-number to the Luminance, Journal of Robotics and Mechatronics, 31-6, pp. 772-780, 2019
- Atsushi Kakogawa, Yuki Komurasaki and Shugen Ma, Anisotropic Shadow-based Operation Assistant for a Pipeline-inspection Robot using a Single Illuminator and Camera, in Proc. 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2017), pp. 1305-1310, 2017, Vancouver, Canada.
- 管内走行装置(特開2017-210210)
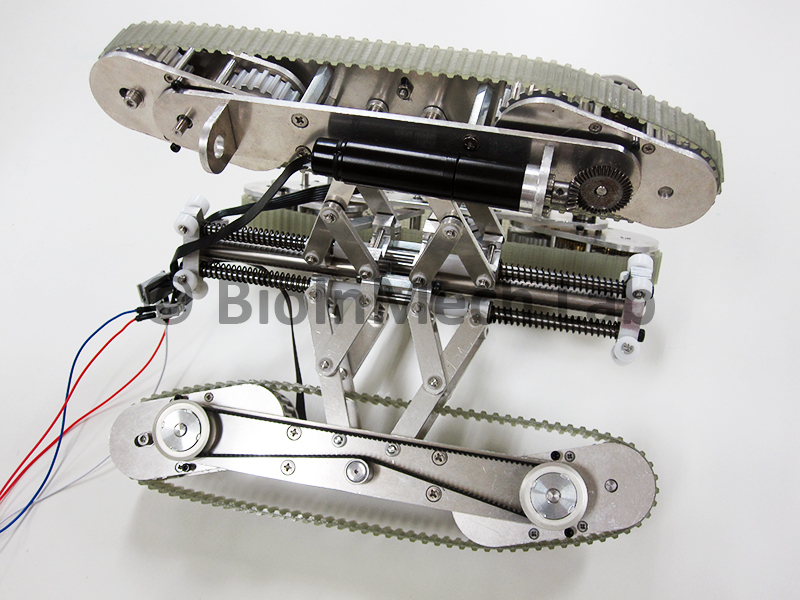
多モジュール並列配置型配管内検査ロボット
多モジュール並列配置型ロボットは複数の推進力を互いに干渉させることによって高い力を発生させることができます.一方,それぞれのモジュールの速度を変えることによって,戦車や建設機械等で見られる超信地旋回のように進行方向を変えることができます.
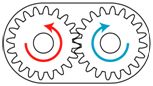
本研究では,これまで以下の図に示すような2つの平歯車が持つ差動機構の特徴を活かして,障害物に接触するとフリッパを持ち上げることのできるクローラ機構を提案し,これら3つで構成される多モジュール並列配置型ロボットを開発しました. これにより,ロボットが障害物を走行する際に,センサを用いて接触を検知する必要がなく,フリッパの角度も制御する必要がありません. また,平行四辺形の対称性を利用して,進行方向の前後に対して同じ機能を持たせることができます. 平行四辺形は形を変えても周長が変化しないため,ベルトのテンション調節機構を新たに追加する必要もありません.現在,インクリーサを介して内径200mmの配管から150mmの配管への適応動作を確認しています.
 |
 |
| ①出力ギアは自転(青) | ②出力ギアは公転(緑) |
- Atsushi Kakogawa and Shugen Ma, Speed Analysis of Three Driving Modules for an In-pipe Inspection Robot to Pass through a Bent Pipe, in Proc. The IEEE Int. Conf. Robotics and Biomimetics (ROBIO2014), pp.1731-1736, 2014.12, Bali, Indonesia
- Atsushi Kakogawa, Shugen Ma, and Shigeo Hirose, An In-pipe Robot with Underactuated Parallelogram Crawler Modules, in Proc. The IEEE Int. Conf. Robotics and Automation (ICRA2014), pp.1687-1692, 2014, HongKong, China
- Atsushi Kakogawa and Shugen Ma, Design of an Underactuated Parallelogram Crawler Module for an In-pipe Robot, in Proc. The IEEE Int. Conf. Robotics and Biomimetics (ROBIO2013), pp. 1324-1329, 2013, Shenzhen, China
- 管内走行装置(出願番号:2014-106963)
螺旋駆動型配管内検査ロボット
螺旋駆動型ロボットは,ある一定の角度で傾けられた受動車輪を回転軸回りの周囲に取り付けて回転させることにより配管内を螺旋を描くように移動できます.この駆動ユニット(プロペラ部)をモータの回転軸に直結させるだけで移動できるため,構造がシンプルになります.また,先端のプロペラにブラシ等の器具を取り付けることによって配管内の清掃に利用することができます.
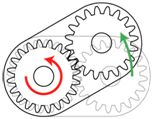
これまで本研究では,右図に示すようなマイタギアが持つ差動機構の特徴を活かして,分岐管で経路選択を行える螺旋駆動型ロボットを開発しました.配管の分岐点でロボット中央に取り付けられた関節のモータを駆動させると,①のように赤から青にトルクが伝達してロボット本体が屈曲します.しかし,関節が左右方向にしか曲がらないのに配管が上下に分岐している場合,これだけでは適応できません. そこで,出力マイタギアの回転軸を配管軸に対しても自由にすることによって,外力に応じて関節の屈曲方向を変える機構を取り入れました.これにより,配管が上下に分岐している状況で関節が左右方向にしか曲がらなくても,モータのトルクが関節の屈曲方向を変える軸へ伝達するため,受動的に分岐管へ適応することができます.

 |
 |
| ①出力ギアは自転(青) | ②出力ギアは公転(緑) |
- Atsushi Kakogawa, Taiki Nishimura, and Shugen Ma, Designing Arm Length of a Screw Drive In-pipe Robot for Climbing Vertically Positioned Bent Pipes, Robotica, Published Online, 2014/06
- Atsushi Kakogawa and Shugen Ma, Stiffness Design of Springs for a Screw Drive In-pipe Robot to Pass through Curved Pipes and Vertical Straight Pipes, Int. J. of Advanced Robotics, 26-3/4, 2012.2, pp.253-276
- Taiki Nishimura, Atsushi Kakogawa and Shugen Ma, Pathway Selection Mechanism of a Screw Drive In-pipe Robot in T-branches, in Proc. 8th IEEE International Conference on Automation Science and Engineering (CASE2012), 2012.8, pp.612-617, Seoul, Korea
