
Wall-climbing Robot
We have developed a wall-climbing robot that attaches itself to a wall by a passive suction method using common suction cups. Although the suction cups need a push force to attach to the wall, they need no external energy to maintain adhesion. Moreover, after the edges of the suction cups are pulled up and air flows into them, the cups can be detached from the wall immediately. By applying these properties of common suction cups, the proposed robot can attach and detach its suction cups using a single motor.
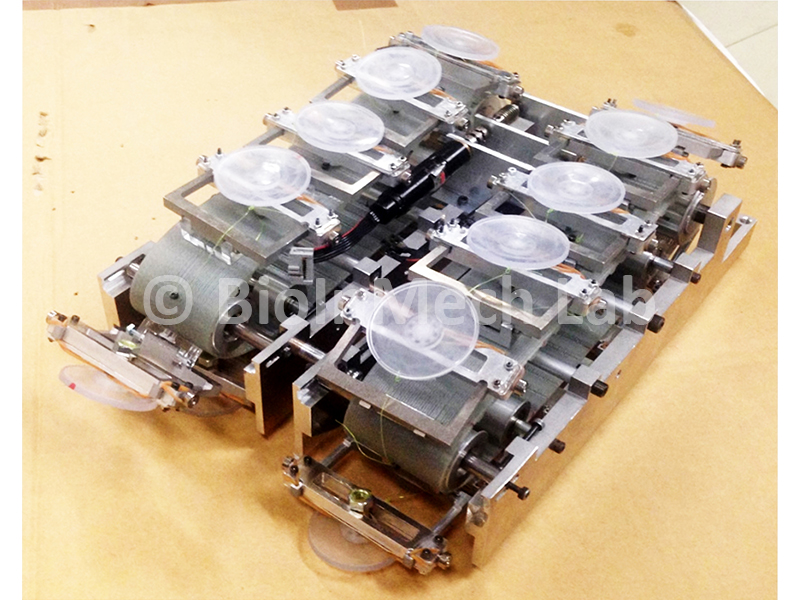
The proposed robot moves using a crawler-driven mechanism and gets attached to a wall using passive suction cups. The robot has a single motor, which drives the rear pulleys. Suction cups are installed on the outside surface of the belt at equal intervals, and the suction cups rotate together with the belt. The movement process of the robot can be described as follows. First, a human operator attaches the robot to a wall by pushing it against the wall. Next, the rotation of the crawler belts forces the suction cups at the front pulleys to contact and attach to the wall. When suction cups reach the rear pulleys, they are detached from the wall by the rotation of the belts. As this sequence continues, the robot makes progress on the wall while maintaining adhesion.

- Dingxin Ge, Chao Ren, Shugen Ma and Takahiro Matsuno, Guide Rail Design for a Passive Suction Cup based Wall-Climbing Robot, in Proc. 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2016), pp. 5776-5781, 2016, Daejeon, Korea.
- Yu Yoshida and Shugen Ma, Design of a Wall-climbing Robot with Passive Suction Cups, In Proc. IEEE Int. Conf. Robotics and Biomimetics, pp. 1513-1518, 2010
- Yu Yoshida and Shugen Ma, A Wall-climbing Robot without Any Active Suction Mechanisms, In Proc. IEEE Int. Conf. Robotics and Biomimetics, pp. 2014-2019, 2011
