
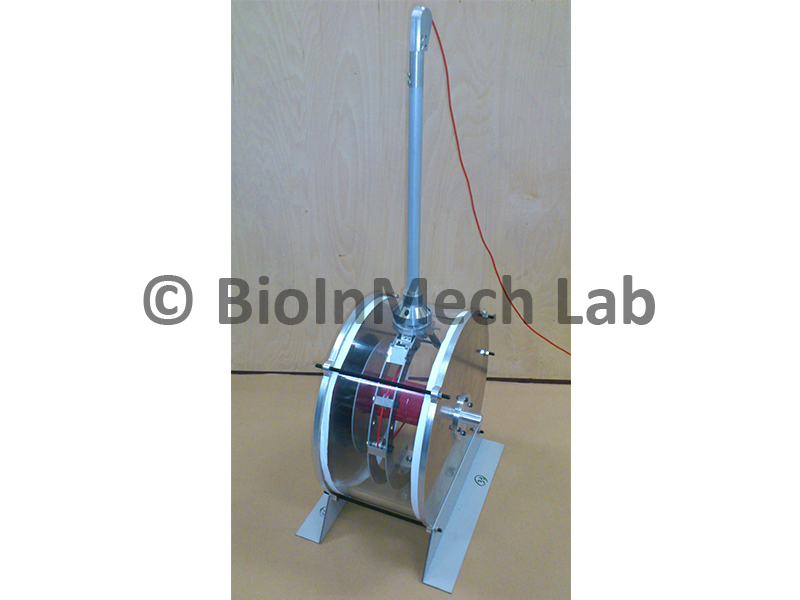
Cable Reel Mechanism for Mobile Robot
Most robots working in nuclear power stations have adopted a tether cable for communications and power supply, however several issues exist concerning these cables. For example, the tether cable of robots could get stuck or entangled with obstacles when used in an unstructured environment. For this reason, cable reels that wind and release cables have been developed. To use them in an unstructured environment, like a crash site of a nuclear power station, cable reel mechanisms should be developed with not only efficient winding mechanisms, that can wind a long cable, but also hermetic designs to facilitate the cleaning of radioactive material from the robots. Therefore, we developed hermetic designs by guiding a cable through a small hole which is drilled in a hermetic case.
- Masato Yoneyama, Shugen Ma and Shigeo Hirose, Development of Unicorn Reel: Hermetic Traction-controllable Cable Reel with Passive-lever Level Winder, In Proc. IEEE Int. Conf. Robotics and Biomimetics, pp. 1180-1185, 2014
