
Multi-legged Walking Robot
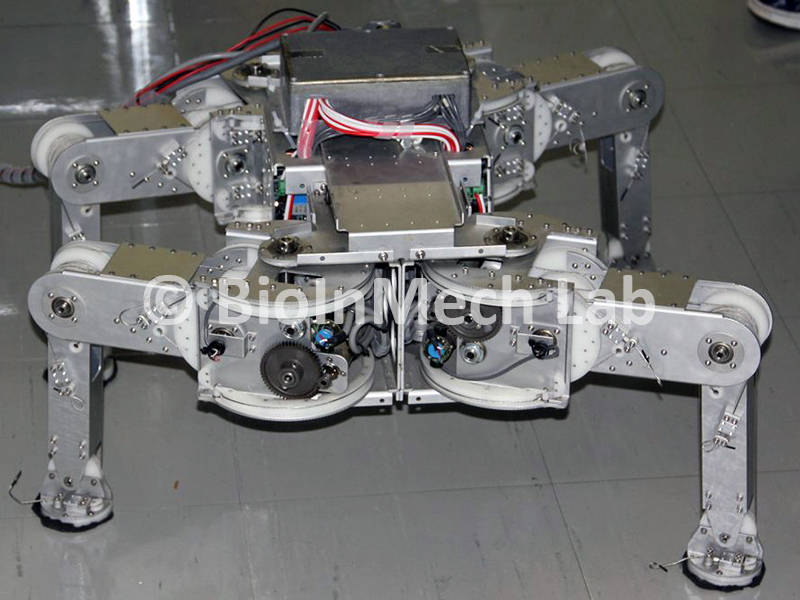
Quadruped robot
The legged robot was expected to be an environment-accessible platform because of its environmental adaptability. With consideration of stability and energy consumption, the quadruped walking robot will be one of the most practical locomotion machines to move about on uneven terrain, and is stablest while walking in a static state. Studies of quadruped gaits can be divided in two parts, according to the nature of the stability, static stability or dynamic stability. Static stability assumes that the vertical projection of the center of gravity (COG) remains always inside the stability polygon with an adequate stability margin during all phases of movements. The stability margin ensures that whatever speed the robot can reach, it will not be carried away by its own momentum, and consequently tip over and fall down. In our research, we focus on the static walking of a quadruped robot for its static stability. This is important for considering the carriage of heavy goods.
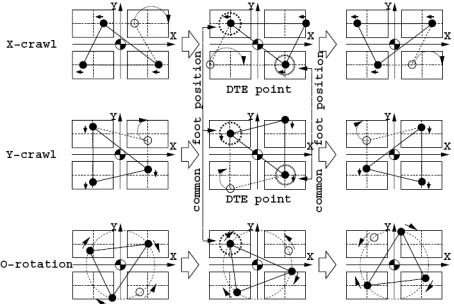
We propose a successive gait-transition method for a quadruped robot to realize omni-directional static walking. The gait transition is successively performed among the crawl gaits and the rotation gaits, while the feet hold in common positions before and after gait transition. The gait-transition time is reduced by carefully designing the foot positions of the crawl gait and the rotation gait, while limiting the feet in rectangular reachable motion ranges.
- Shugen Ma, Takashi Tomiyama and Hideyuki Wada Omni-directional Static Walking of a Quadruped Robot, IEEE Trans. on Robotics, Vol. 21, No. 2, pp.152-161, 2005
- Lei Zhang, Shugen Ma, Yoshinori Honda and Kousuke Inoue, Omnidirectional Static Walking of a Quadruped Robot on a Slope, Journal of Robotics and Mechatronics, Vol. 18, No. 1, pp.51-58, 2006
Multi-legged robot with passive segment joints
Under construction.
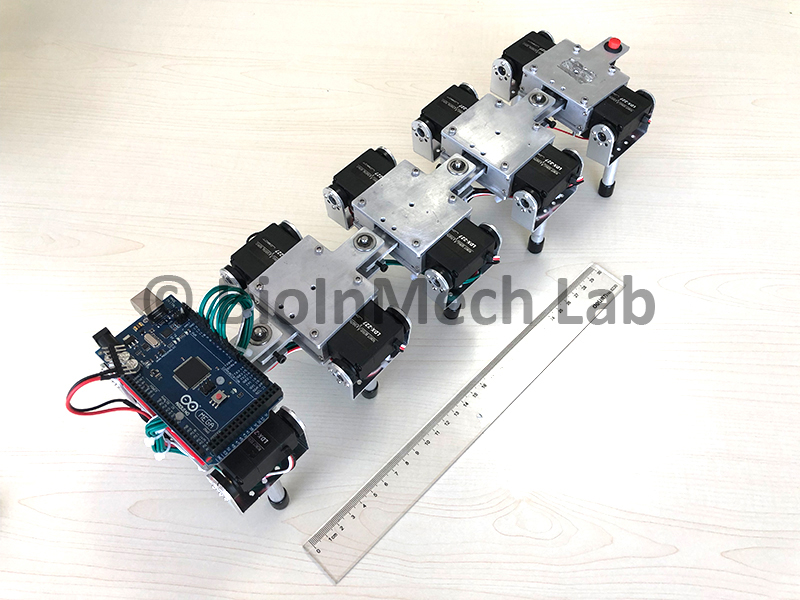
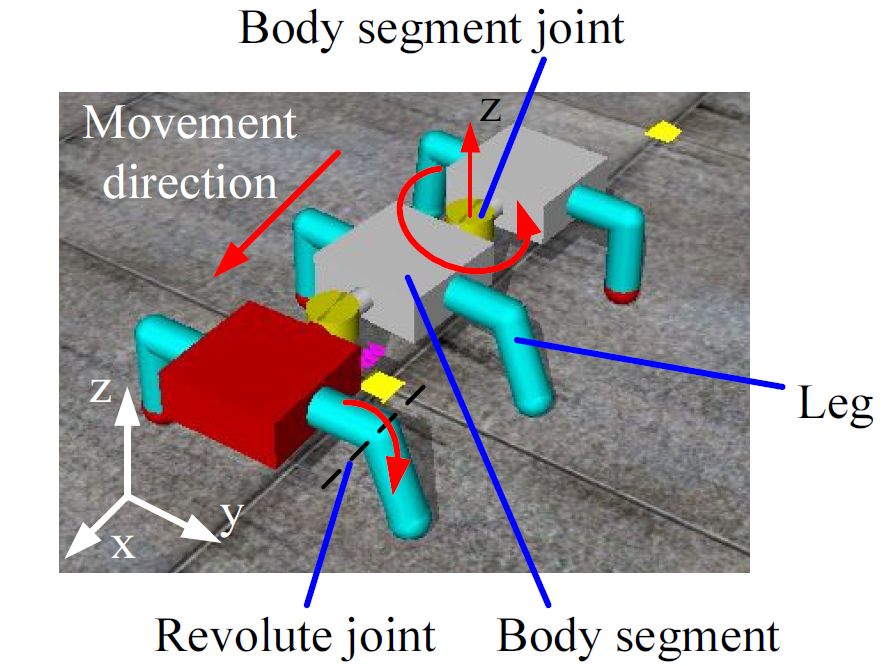
- Yongchen Tang, Shugen Ma, Yi Sun and Dingxin Ge, Planar Legged Walking of a Passive-spine Hexapod Robot, Advanced Robotics, Vol. 29, No. 23, pp. 1510-1525, 2015
- Yongchen Tang, Shugen Ma, Yi Sun and Dingxin Ge, A Multi-legged Robot with Less Actuators by Applying Passive Body Segment Joint, In Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 2828-2833, 2012
