
Automated Rust Removal: Rust Detection and Visual Servo Control
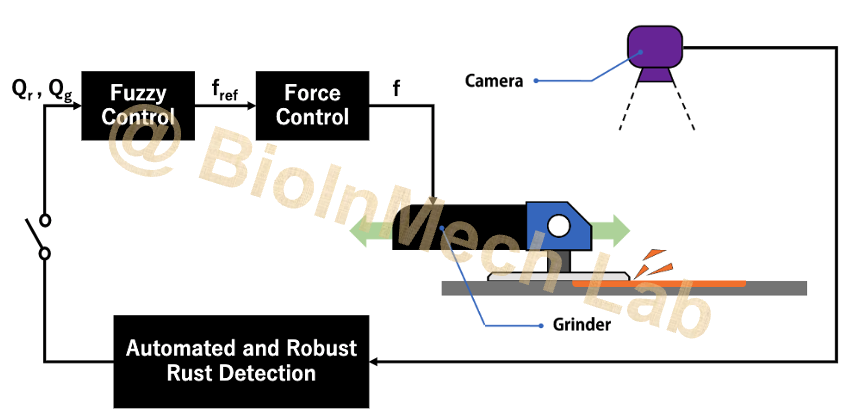
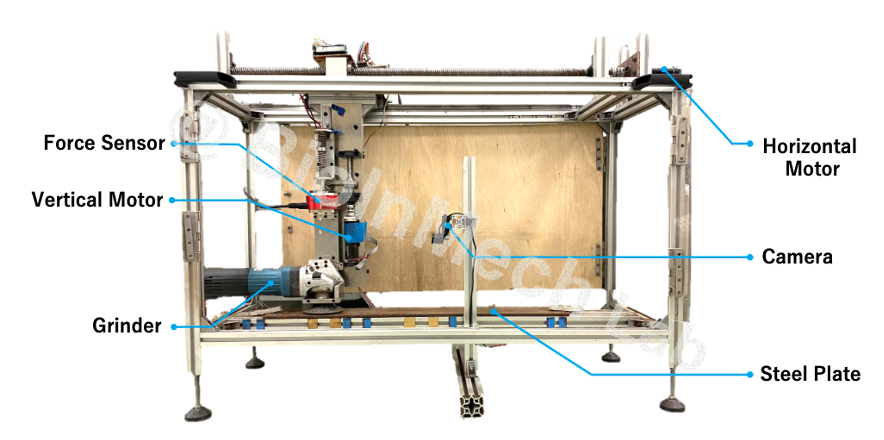
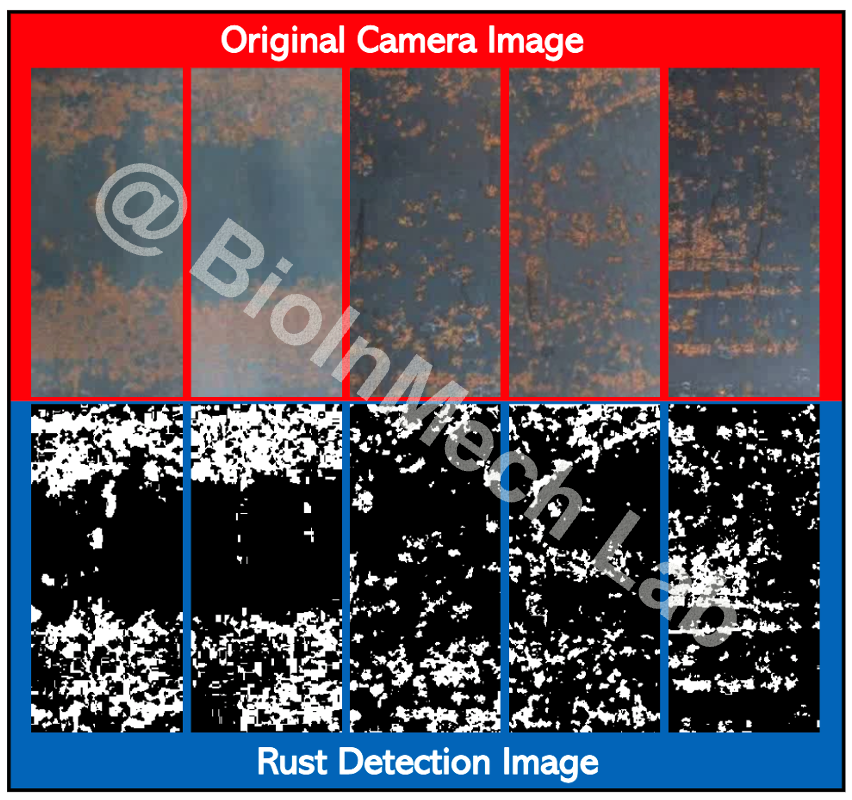
Rust removal is one of the most hazardous and difficult tasks in the restoration of steel structures such as bridges and towers. Robotic systems provide an alternative technology for performing the task safely and efficiently. The capability to automatically remove rust considering the condition of the rusted area is a significant function of robotic systems. We proposed an approach for identifying rust as a key technology in the rust removal process. Rust detection can be performed automatically by processing a sequence of camera images. For the utilization of the approach in practical applications, it is designed to be robust to variations in the conditions of rusted areas caused by the presence of working tools or rust powders in the images. A fuzzy force controller that replicates the human behavior during rust removal is designed to construct a visual servo control framework for the rust removal process. The proposed approach is validated using experiments conducted on a rust-grinding robotic prototype.
- Yang Tian, Guoteng Zhang, Jie Ma and Shugen Ma, Automated Rust Detection via Digital Image Recognition during Grinding Work Process, in Proc. 2018 IEEE International Conference on Information and Automation (ICIA 2018), pp. 318-323, 2018
- Yang Tian and Shugen Ma, A Rust Removed Region Detection for Automated Rust Detection during Grinding Work Process, in Proc. 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO 2019), 12, pp. 2163-2168, 2019
- Yang Tian, Guoteng Zhang, Kenji Morimoto and Shugen Ma, Automated Rust Removal: Rust Detection and Visual Servo Control, Automation in Construction, 134-104043, pp. 1-11, 2022
