
自動錆取り:錆検出及びビジュアルサーボ
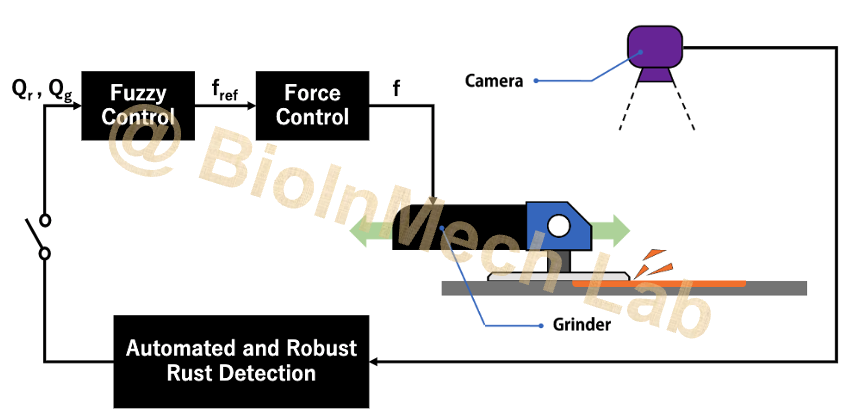
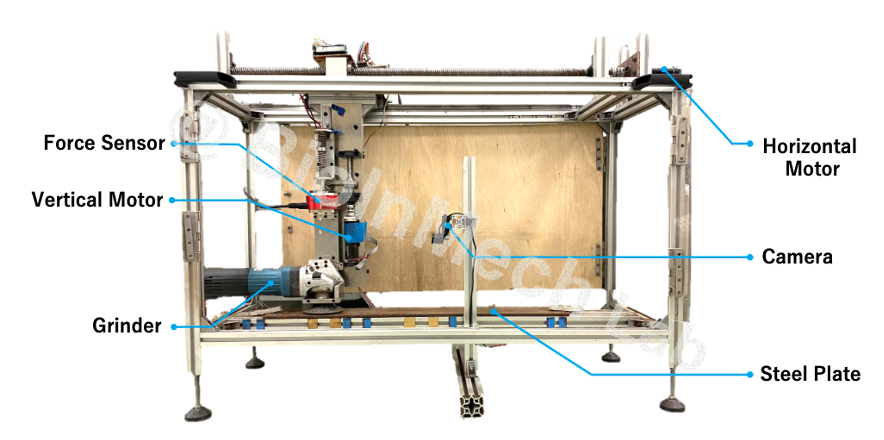
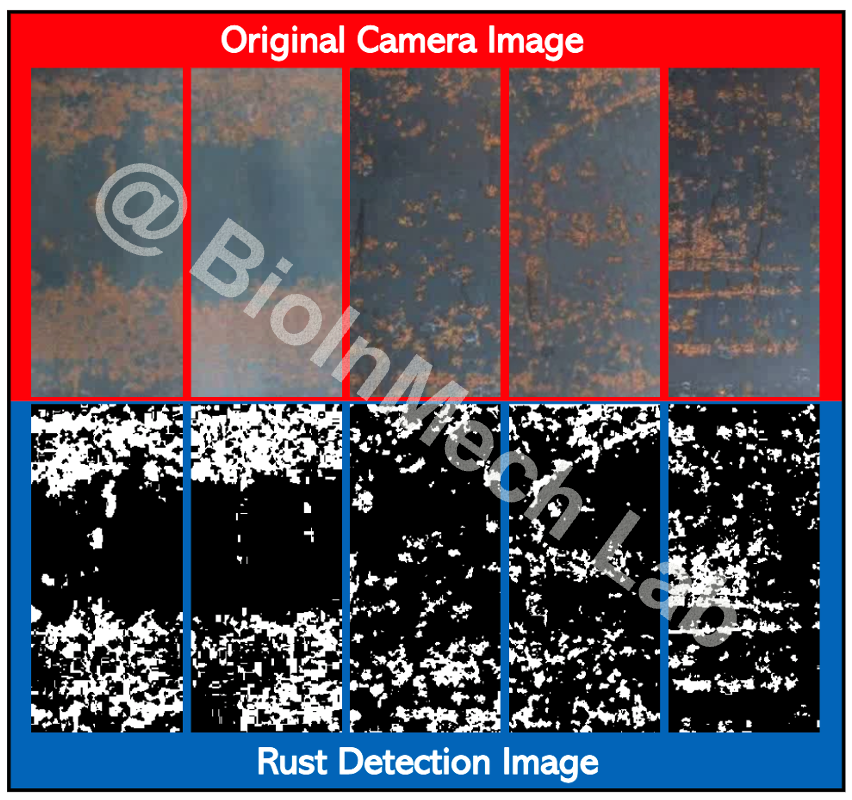
鉄橋や鉄塔などの鉄製インフラのメンテナンスにおいて、錆取りは危険かつ困難な作業である。この作業を安全かつ効率的に行うため、ロボット技術の応用が期待されている。錆びついた箇所の状況を見極めながら自動で錆をとる機能はロボットシステムに対して重要である。我々は錆取りの過程においての錆検出手法及び制御方法を提案した。錆検出は一連のカメラ画像を処理することによって自動的に行われる。この検出手法は実用化するため、画像内に映る作業道具や錆塵の存在など様々な状況の外乱に対してロバストな設計となっている。作業者の錆取り動作を再現するファジーフォース制御はビジュアルサーボを実現する。提案する手法の有用性は錆取りロボットで実施された実験を用いて検証された。
- Yang Tian, Guoteng Zhang, Jie Ma and Shugen Ma, Automated Rust Detection via Digital Image Recognition during Grinding Work Process, in Proc. 2018 IEEE International Conference on Information and Automation (ICIA 2018), pp. 318-323, 2018
- Yang Tian and Shugen Ma, A Rust Removed Region Detection for Automated Rust Detection during Grinding Work Process, in Proc. 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO 2019), 12, pp. 2163-2168, 2019
- Yang Tian, Guoteng Zhang, Kenji Morimoto and Shugen Ma, Automated Rust Removal: Rust Detection and Visual Servo Control, Automation in Construction, 134-104043, pp. 1-11, 2022
