
移動ロボット用ケーブルリール
2011年3月に起きた東日本大震災の後,福島第一原子力発電所では事故状況を確認するために様々なロボットが投入されており,その多くはケーブルによって通信や電源供給が行われています.しかし,複雑な構造をした発電所内部ではケーブルが障害物に引っかかりロボットが移動困難な状態に陥いる恐れがあります.そこで本研究では,状況に応じてケーブルを出し入れすることのできるケーブルリールを開発しました.発電所内部で使用するためには,ケーブルを効率よくリールに巻くこと,放射性物質がリール内部に入らないように密閉構造にすること,等々が要求されます.通常,釣り用のリールなどではレベルワインダーと呼ばれるケーブルを均一に巻く機構(カム機構)が用いられますが,我々はバネを用いた受動的でコンパクトなレベルワインダーを開発し,さらにそれらを筐体で密閉することで上記の要求を満たすケーブルリールを実現しています.
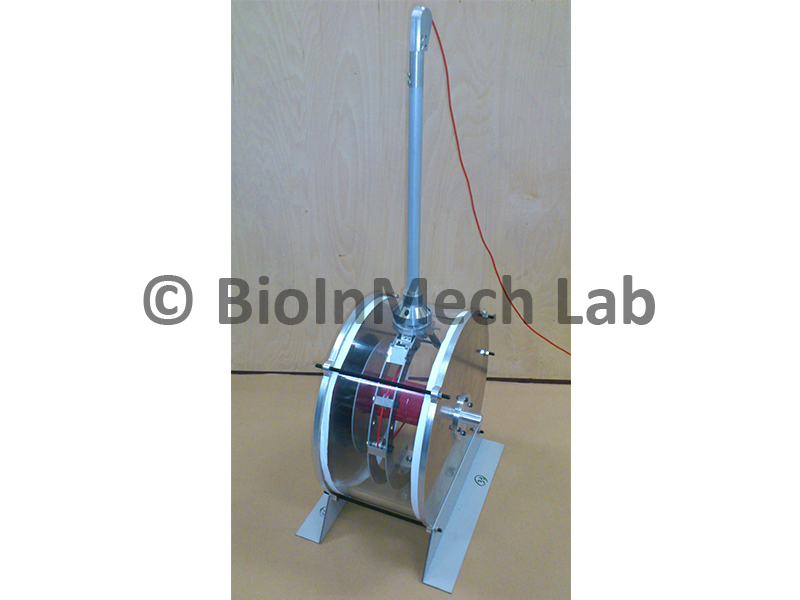
- Masato Yoneyama, Shugen Ma and Shigeo Hirose, Development of Unicorn Reel: Hermetic Traction-controllable Cable Reel with Passive-lever Level Winder, In Proc. IEEE Int. Conf. Robotics and Biomimetics, pp. 1180-1185, 2014
