
多脚歩行ロボット
四脚歩行ロボット
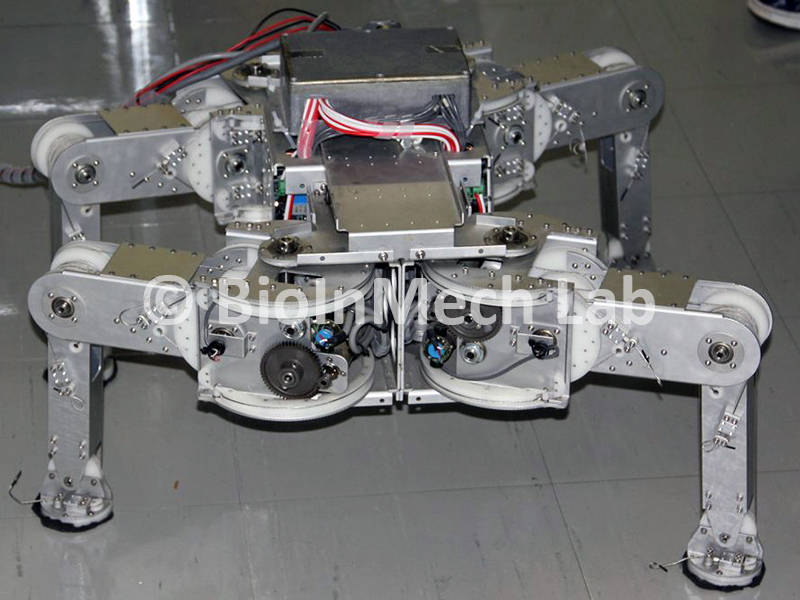
本研究室では,環境適応型移動ロボット研究の一環として,四脚歩行ロボットの研究も行っています.四脚歩行ロボットは,その環境適応能力や走破性の高さか ら,さまざまな環境を移動するプラットフォームとして利用されることが期待されています.(写真:普及型4足歩行機械 TITAN VIII)
一般に脚歩行ロボットは脚の数が増えれば増えるほど安定性が増しますが,脚の数が増えるに連れて関節を駆動するアクチュエータ(モータ)の数も増え,重さ も増えてしまいます.また,アクチュエータが多ければ消費するエネルギーも増えることになります.したがって,脚歩行ロボットを考える際には,安定性を十分に保ちつつ,できる限り少ない脚数となることを考える必要があります.このような理由から,静力学的な安定性を保ちつつ歩行できる最低限度の脚数で ある4脚が,脚歩行ロボットの世界では広く取り扱われています.
脚の数が多いとそれほど問題にはならないのですが,4脚の場合には脚を上げる順番や上げた脚を着地させる位置などをいい加減にすると安定性を損ねてしまう という問題があります.ですから,脚を上げる順番やそのタイミング,着地させる位置などは歩行する際の重要な要素といえます.一般に,この脚を上げる動作 (遊脚化)とそのタイミングを歩容といい,歩容を計画することが,すなわち歩き方を計画することと考えることができます.
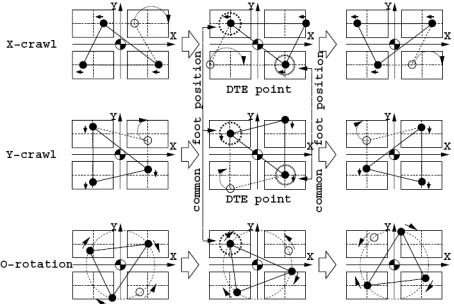
四脚歩行ロボットでは,真っ直ぐ歩く時は歩行速度と安定性に優れたクロール歩容と呼ばれる歩行パターンが広く使われています.しかし,いつでもクロール歩 容が良いというわけではなく,その場でぐるっとまわるような場合には,回る方向に遊脚順序が進んで行く循環歩容の方が,旋回角速度でも安定性でも勝ってい ます. したがって,ロボットの移動方向や旋回状態に応じた歩行パターンの使い分けが必要となるわけです.そこで,本研究室では現在,静力学的な安定性を保ったままあらゆる方向に連続的に歩行できる歩行パターンのつなぎ方(歩容遷移方法)について研究を進めています.
- Shugen Ma, Takashi Tomiyama and Hideyuki Wada Omni-directional Static Walking of a Quadruped Robot, IEEE Trans. on Robotics, Vol. 21, No. 2, pp.152-161, 2005
- Lei Zhang, Shugen Ma, Yoshinori Honda and Kousuke Inoue, Omnidirectional Static Walking of a Quadruped Robot on a Slope, Journal of Robotics and Mechatronics, Vol. 18, No. 1, pp.51-58, 2006
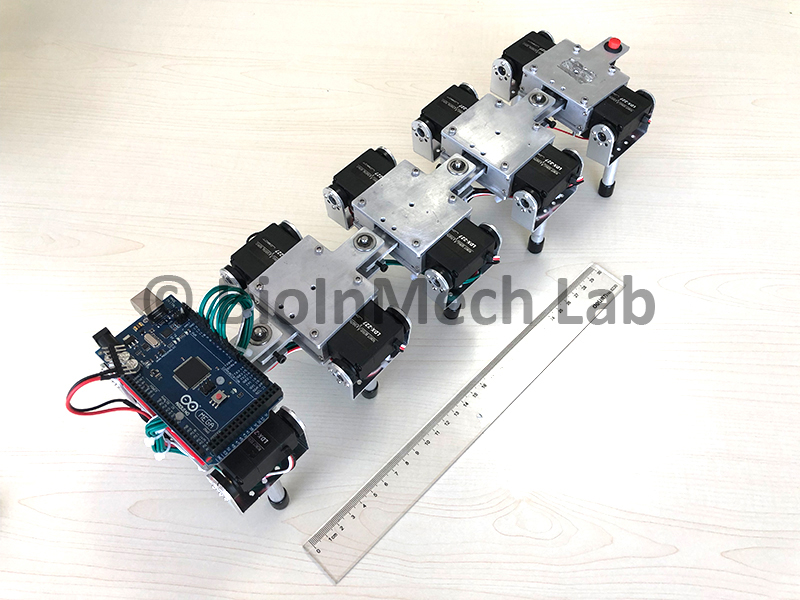
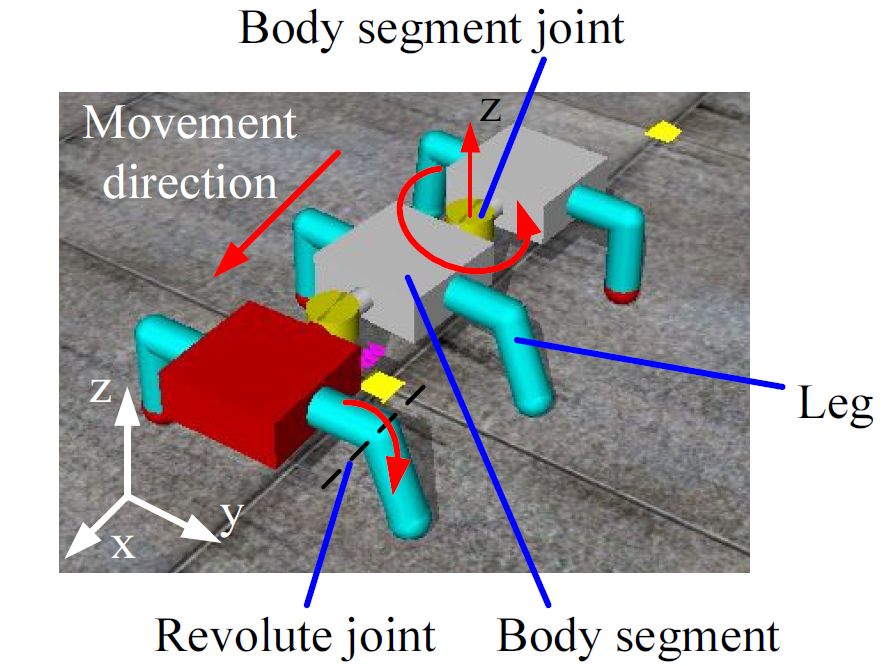
受動体節間関節を有する多脚歩行ロボット
工事中.
- Yongchen Tang, Shugen Ma, Yi Sun and Dingxin Ge, Planar Legged Walking of a Passive-spine Hexapod Robot, Advanced Robotics, Vol. 29, No. 23, pp. 1510-1525, 2015
- Yongchen Tang, Shugen Ma, Yi Sun and Dingxin Ge, A Multi-legged Robot with Less Actuators by Applying Passive Body Segment Joint, In Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 2828-2833, 2012
